
























作品詳情
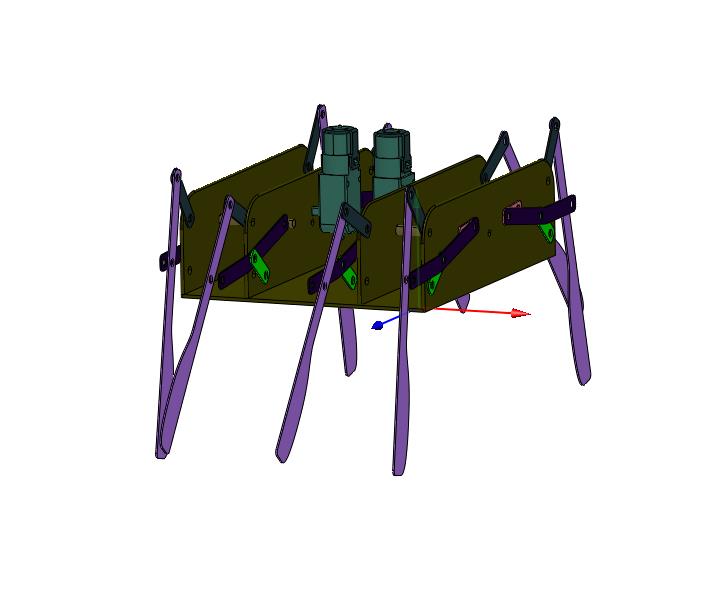
螃蟹仿生八足機器人是一種科技小制作,其設(shè)計靈感來源于螃蟹的獨特行走方式。該機器人通過模擬螃蟹的步態(tài)和肢體運動,實現(xiàn)了在復(fù)雜環(huán)境下的高效移動。其制作涉及機械結(jié)構(gòu)、電子控制、傳感器技術(shù)等多個領(lǐng)域,展現(xiàn)出高度的智能化和靈活性。通過精確的控制算法和先進(jìn)的材料應(yīng)用,機器人能夠完成多種任務(wù),如探索、救援等。這一科技小制作體現(xiàn)了現(xiàn)代科技對于仿生學(xué)的深入研究和應(yīng)用。



平diy桌面級快速成型3D打印機")

電機4軸高精度自動化機械臂")


動臺袋子印畫設(shè)備")






全面罩")



